DHP010
쌓을 수 있는 핸들 잡기 도구
필요
2단계 공정으로 큰 병(> XNUMXL)을 블로우 성형할 때 병 자체에 손잡이를 불어넣는 것은 불가능하다. 따라서 날아간 핸들 대신 사용할 수 있습니다. 외부 플라스틱 손잡이. 에이 핸들 애플리케이터 이것들을 병에 적용합니다.
(반면 XNUMX단계 공정에서는 핸들을 프리폼에 바로 주입할 수 있습니다. 그리고 작은 병의 경우 딥 그립 기술도 사용할 수 있습니다.)
그러나 외부 핸들을 사출 성형하는 전통적인 방법은 많은 문제를 야기합니다.
예: 언제 생산 핸들 플라스틱이 아직 식지 않은 상태에서 작업자는 많은 양의 핸들을 무질서한 방식으로 상자에 집어넣어야 하는 경우가 많습니다. 이로 인해 종종 뒤틀림, 수축 or 흉한 모습. 결과적으로 이로 인해 라인 중단, 잼등. 적어도 이는 기존 핸들 애플리케이터의 경우입니다.
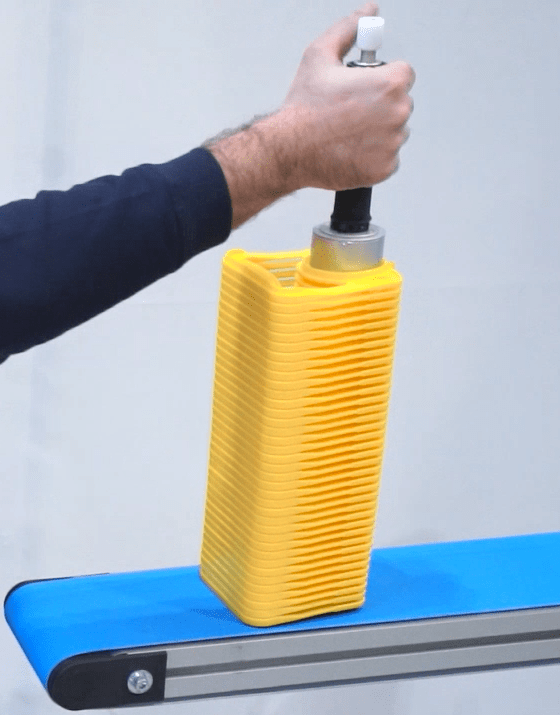
따라서 이를 방지하기 위해 Delta Engineering에서는 DHP301 사용할 수 있는 방식으로 애플리케이터를 다루십시오. 쌓을 수 있는 핸들. 그리고 쌓을 수 있는 손잡이 더미를 쉽게 잡기 위해 DHP010 테이크아웃 도구를 사용할 수 있습니다!
도구
- 주입하는 쪽에서는 (제조) 표준 취출 로봇은 다양한 층의 손잡이를 잡고 이를 벨트 위에 쌓습니다.
이런 식으로 여러 개를 만들 수 있습니다. 손잡이 더미 주사쪽에. 그렇게 함으로써 앞서 언급한 수축, 변형 등의 모든 문제를 피할 수 있습니다.
원하는 핸들 수에 도달하면 스태킹 컨베이어 한 칸 앞으로 이동하면 새로운 파일을 지을 수 있습니다.
이는 많은 양의 데이터를 생성하므로 완벽한 솔루션입니다. 운영자를 위한 버퍼/시간.
여러분의 시간과 재능으로 미리 만들어진 스택을 잡아 와 더불어 DHP010 도구하고 삽입하다 그들 골판지 상자에.
- 블로우 성형면에, 우리는 그 반대를 할 수 있습니다.
보다 구체적으로, 도구를 사용하여 다음을 수행할 수 있습니다. 판지 상자에서 더미를 집습니다 그리고 풀어줘 투입 컨베이어 위로 우리의 DHP301 핸들 애플리케이터.
관련 기계
스크램블러 없이 어플리케이터 처리: DHP301